“It’s like sitting in a quiet meeting room where you and I speak softly, versus a room where ten people talk at once,” explains Bjørn Folkvord Esaiassen, Senior System Architect at Ixys.
“On Wi-Fi, which normally has very low latency, everyone might try to talk over each other. Suddenly you go from 2–3 milliseconds of delay to over 100 milliseconds or more. Cellular is a bit better because someone controls who speaks when, but if many talk at once the delays increase, and sometimes there just isn’t enough time (capacity) for everyone to speak. If you’re unlucky, a guy blows a trumpet or plays a guitar during your turn, drowning your message. That creates unpredictability, variation, and sometimes lost or incomplete information,” he says.
In safety-critical environments like airports, that margin matters. Even brief interruptions can trigger unnecessary stops or disrupt operations.
“As operators, we rely on stable communication with very low latency. Any dropout can halt the vehicle in situations where continuity is crucial,” says Kjartan Nilsen, CTO at Roboxi.
If a vehicle moves at 50 km/h, it travels about 14 meters in a second. “When you press an emergency stop button, you cannot accept that the signal needs half a second or more to arrive,” Esaiassen adds.
“We’re talking about a maximum of around 250 milliseconds — still 3.5 meters — and if you go faster, that maximum may need to be even lower.”

A “virtual network cable” with multiple legs to stand on
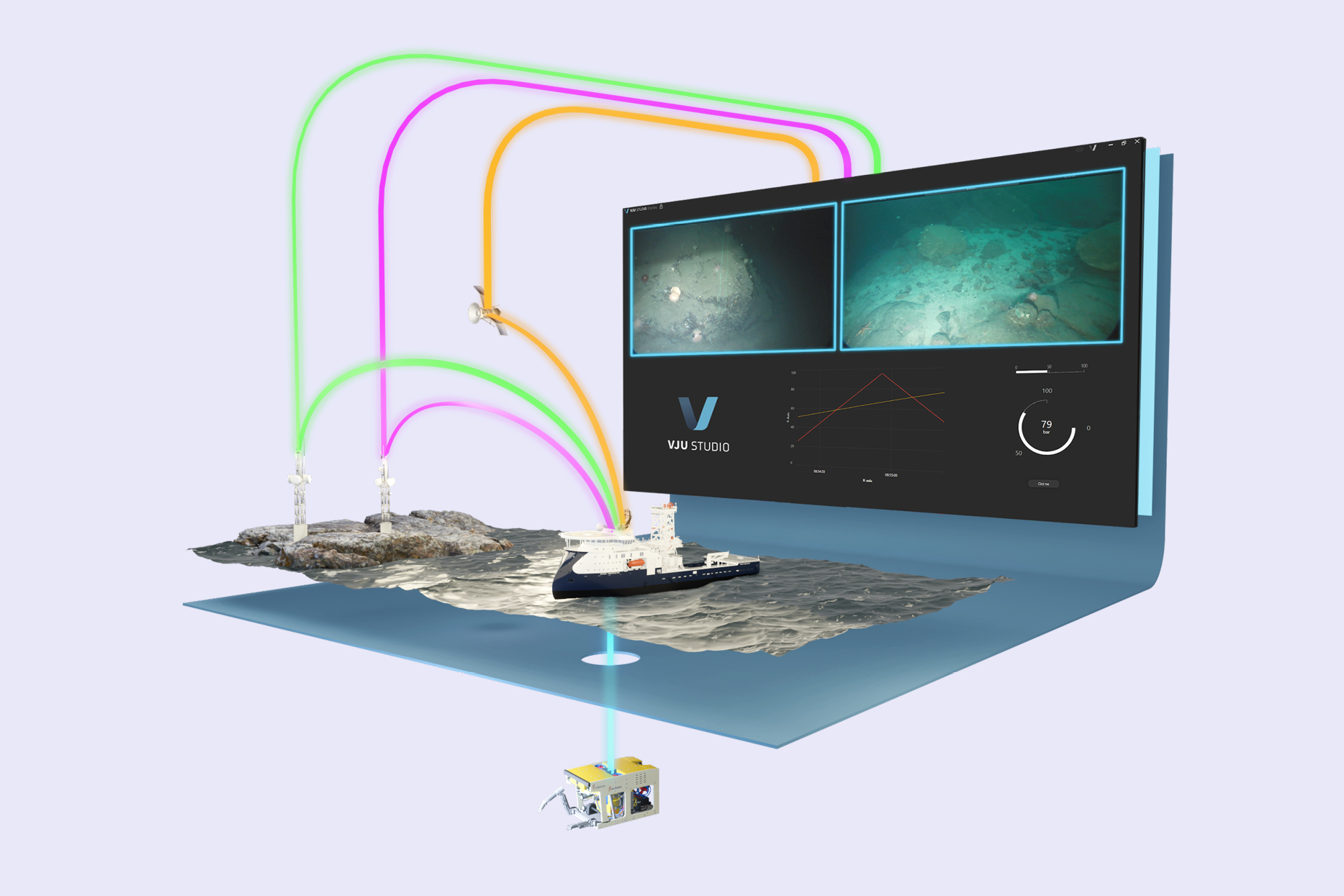
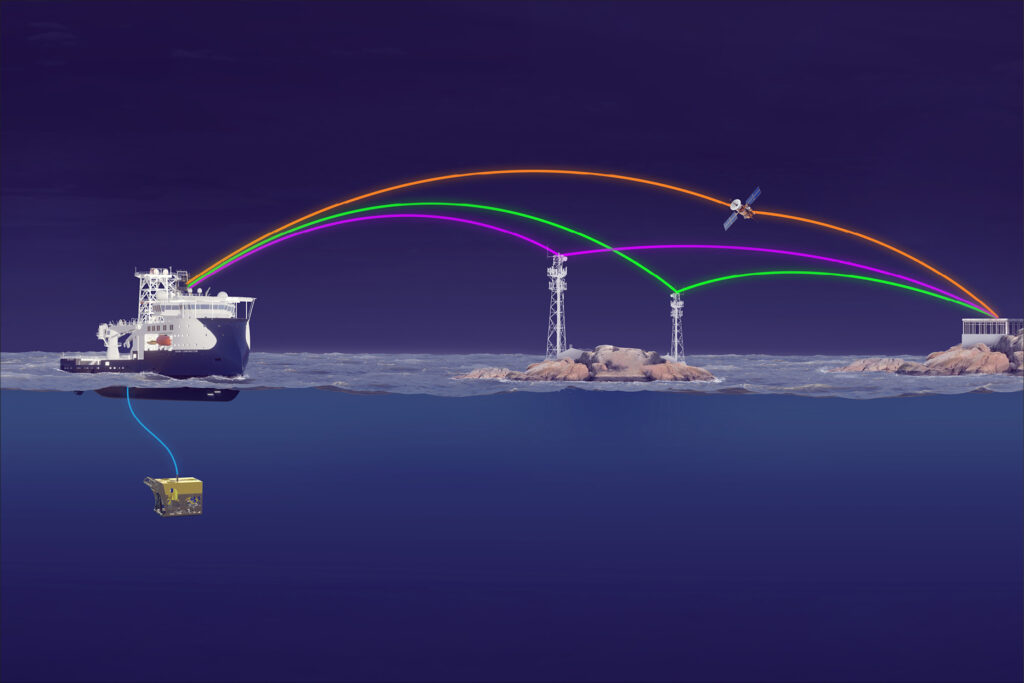
Reacta MultiLink is Ixys’ solution to this challenge. It combines several physical links — typically public and/or private 4G/5G, unlicensed ISM bands, and satellite — into one logical connection. To the equipment on each end, it appears as a single, stable cable, but under the hood advanced real-time control manages the flow.
“We use many parallel channels and technologies simultaneously. If noise, interference, or outages affect one channel, it’s unlikely they hit all channels at once. Reacta continuously measures quality and chooses the right moment and the right channel to send data,” Esaiassen says.
Nilsen highlights how crucial this becomes in real-world conditions: “In areas with weaker coverage or heavy interference, the ability to shift seamlessly between channels gives us the predictability we need.”
Reacta operates in two main modes: Stability Mode, which benefits real-time tasks like emergency stops and control signals, and Capacity Mode, which maximizes throughput — for example when uploading large data sets after an operation. These modes can be combined and switched dynamically. Reacta can also support the control system by reporting expected capacity so other components can adapt and avoid congestion.


Frankfurt, Italy, and Sola
Together with Velo and Roboxi, Ixys has tested Reacta under demanding conditions at several European airports. The journey has included both frustration and breakthrough moments.
“At times the equipment was simply unusable. On one 200-meter stretch we had around 50 safety-communication dropouts due to terrible radio conditions. After we introduced the improved algorithm in Reacta, we went from 50 to zero,” Esaiassen says.
The change had immediate operational effects. Earlier communication setups caused frequent pauses in Roboxi’s autonomous vehicles, particularly in difficult areas.
“Colleagues who worked with earlier prototypes instantly noticed the difference. Sudden stops were a recurring frustration — and they practically disappeared with the improved setup,” Nilsen says.
A major breakthrough came at Frankfurt Airport, where theory finally matched reality. Lessons from Frankfurt were then implemented at Sola Airport, where autonomous Roboxi vehicles previously had to be physically followed by a car in case they stopped.
“When we got Reacta into the loop at Sola, the robot was allowed to run independently on the runway. It was a game changer,” Esaiassen recalls.
In Italy, new challenges appeared — this time caused by strong reflections and interference. “Version 1.0 was proven in Frankfurt, while version 2.0 solved the problems we experienced in Italy. We see a pattern: there are always ‘black holes’ in coverage that must be compensated for when margins are extremely small. Ninety-nine percent reliability isn’t enough in real-time applications,” he says.
Communication as part of the control system
For Velo, which builds the Roboxi vehicles, communication is not a separate add-on.
“Communication is the fundamental enabler. Nothing stands alone anymore. Customers expect visibility and control across distributed components and that requires integrated communication to be the backbone of the system,” says Nils Joar Steinsund, Systems Engineering Manager at Velo.
Local collaboration has been essential, and he adds: “Worst case, if we had bought a standard communication system from an anonymous company abroad, every problem could have delayed us for months. Roboxi, Velo and Ixys sit in the same region, see the same issues, and can act quickly.”
Nilsen phrases Roboxi’s requirement simply: “We needed stable and robust communication. Reacta delivered on latency and reliability — two things we depend on to operate safely.”
Moving toward more use cases
Reacta MultiLink is now a mature concept, proven in tough mobile environments where video, control signals, and safety systems run simultaneously. It is technology-agnostic and can use any IP-based carrier.
“We built Reacta because nothing on the market solved these problems well enough. Now we see the same technology making a difference in airports, offshore, mining, aquaculture – anywhere concurrency, safety, and stability matter,” says Esaiassen.
For Ixys, Velo, and Roboxi, Reacta has already bridged the gap between theory and operation. The next step is helping more organizations recognize a need they may not know they have — until communication suddenly becomes the weakest link.
Read more about Reacta MultiLink.
Read more about Roboxi use case.
Read more about Velo Robotics.
Read more about Roboxi.
This article war first published in DYP Magasinet January 2026.
Text: Malin Sofie Leirvik, Communications Specialist Envirex Group
Photo: Bård Sondre Dalen, Senior Industrial Designer Velo Robotics
Anne Linn Olsen, Marketing Specialist Ixys AS